在前面的文章中,已经介绍了Redis的几种高可用技术:持久化、主从复制和哨兵,但这些方案仍有不足,其中最主要的问题是存储能力受单机限制,以及无法实现写操作的负载均衡。
上面的问题可以归纳为为什么需要集群?
- 并发量(我们知道Redis官方宣称单机QPS是 10万/每秒,但是当我们业务是100万/每秒的时候单机就不行了)
- 数据量(单机内存总是有限的,当我们的业务量远大于单机内存的时候就会有问题)
- 网络流量(单机网络不足以支持业务量的时候)
Redis集群解决了上述问题,实现了较为完善的高可用方案。本篇将详细介绍集群,主要内容包括:集群的作用;集群的搭建方法及设计方案;集群的基本原理;客户端访问集群的方法;以及其他实践中需要的集群知识(集群扩容、故障转移、参数优化等)。
一、集群的作用
集群,即Redis Cluster,是Redis 3.0开始引入的分布式存储方案。
集群由多个节点(Node)组成,Redis的数据分布在这些节点中。集群中的节点分为主节点和从节点:只有主节点负责读写请求和集群信息的维护;从节点只进行主节点数据和状态信息的复制。
集群的作用,可以归纳为两点:
1、数据分区:
数据分区(或称数据分片)是集群最核心的功能。
集群将数据分散到多个节点,一方面突破了Redis单机内存大小的限制,存储容量大大增加;另一方面每个主节点都可以对外提供读服务和写服务,大大提高了集群的响应能力。
Redis单机内存大小受限问题,在介绍持久化和主从复制时都有提及;例如,如果单机内存太大,bgsave和bgrewriteaof的fork操作可能导致主进程阻塞,主从环境下主机切换时可能导致从节点长时间无法提供服务,全量复制阶段主节点的复制缓冲区可能溢出……。
2、高可用:
集群支持主从复制和主节点的自动故障转移(与哨兵类似);
当任一节点发生故障时,集群仍然可以对外提供服务。
二、集群的搭建
这一部分我们将搭建一个简单的集群:共6个节点,3主3从。方便起见:所有节点在同一台服务器上,以端口号进行区分;配置从简。3个主节点端口号:7000/7001/7002,对应的从节点端口号:8000/8001/8002。
集群的搭建有两种方式:(1)手动执行Redis命令,一步步完成搭建;(2)使用Ruby脚本搭建。二者搭建的原理是一样的,只是Ruby脚本将Redis命令进行了打包封装;在实际应用中推荐使用脚本方式,简单快捷不容易出错。下面分别介绍这两种方式。
1. 执行Redis命令搭建集群
集群的搭建可以分为四步:
(1)启动节点:将节点以集群模式启动,此时节点是独立的,并没有建立联系;
(2)节点握手:让独立的节点连成一个网络;
(3)分配槽:将16384个槽分配给主节点;
(4)指定主从关系:为从节点指定主节点。
实际上,前三步完成后集群便可以对外提供服务;但指定从节点后,集群才能够提供真正高可用的服务。
(1)启动节点
集群节点的启动仍然是使用redis-server命令,但需要使用集群模式启动。下面是7000节点的配置文件(只列出了节点正常工作关键配置,其他配置(如开启AOF)可以参照单机节点进行):
1 | #redis-7000.conf |
其中的cluster-enabled和cluster-config-file是与集群相关的配置。·
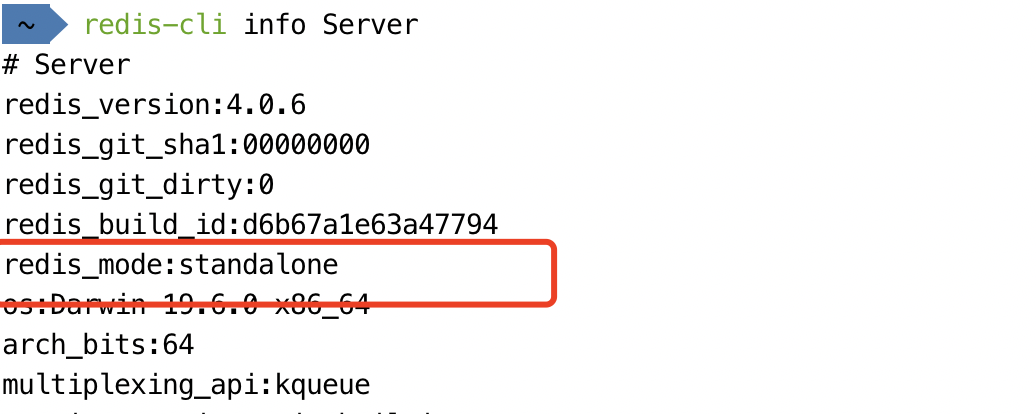
cluster-enabled yes:Redis实例可以分为单机模式(standalone)和集群模式(cluster)。cluster-enabled yes可以启动集群模式。在单机模式下启动的Redis实例,如果执行info server命令,可以发现redis_mode一项为standalone,如下图所示:
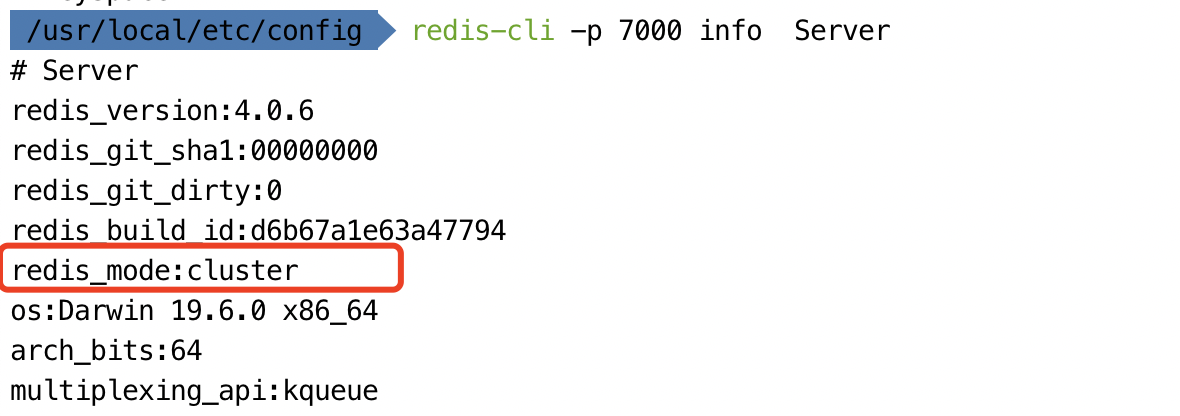
集群模式下的节点,其redis_mode为cluster,如下图所示:
cluster-config-file:该参数指定了集群配置文件的位置。每个节点在运行过程中,会维护一份集群配置文件;每当集群信息发生变化时(如增减节点),集群内所有节点会将最新信息更新到该配置文件;当节点重启后,会重新读取该配置文件,获取集群信息,可以方便的重新加入到集群中。也就是说,当Redis节点以集群模式启动时,会首先寻找是否有集群配置文件,如果有则使用文件中的配置启动,如果没有,则初始化配置并将配置保存到文件中。集群配置文件由Redis节点维护,不需要人工修改。
编辑好配置文件后,使用redis-server命令启动该节点:
1 | redis-server redis-7000.conf |
节点启动以后,通过cluster nodes命令可以查看节点的情况,如下图所示。
1 | # redis-cli -p 7000 cluster nodes |
其中返回值第一项表示节点id,由40个16进制字符串组成,节点id与 主从复制中提到的runId不同:Redis每次启动runId都会重新创建,但是节点id只在集群初始化时创建一次,然后保存到集群配置文件中,以后节点重新启动时会直接在集群配置文件中读取。
其他节点使用相同办法启动,不再赘述。需要特别注意,在启动节点阶段,节点是没有主从关系的,因此从节点不需要加slaveof配置。
(2)节点握手
节点启动以后是相互独立的,并不知道其他节点存在;需要进行节点握手,将独立的节点组成一个网络。
节点握手使用cluster meet {ip} {port}命令实现,例如在7000节点中执行cluster meet 192.168.0.104 7001,可以完成7000节点和7001节点的握手;注意ip使用的是局域网ip而不是localhost或127.0.0.1,是为了其他机器上的节点或客户端也可以访问。此时再使用cluster nodes查看:
1 | # redis-cli -p 7000 |
在7001节点下也可以类似查看:
1 | # redis-cli -p 7001 |
同理,在7000节点中使用cluster meet命令,可以将所有节点加入到集群,完成节点握手:
1 | cluster meet 192.168.0.104 7002 |
执行完上述命令后,可以看到7000节点已经感知到了所有其他节点:
1 | 127.0.0.1:7000> cluster nodes |
通过节点之间的通信,每个节点都可以感知到所有其他节点,以8000节点为例:
1 | # redis-cli -p 8000 cluster nodes |
(3)分配槽
在Redis集群中,借助槽实现数据分区,具体原理后文会介绍。集群有16384个槽,槽是数据管理和迁移的基本单位。当数据库中的16384个槽都分配了节点时,集群处于上线状态(ok);如果有任意一个槽没有分配节点,则集群处于下线状态(fail)。
cluster info命令可以查看集群状态,分配槽之前状态为fail:
1 | 127.0.0.1:7000> cluster info |
分配槽使用cluster addslots命令,执行下面的命令将槽(编号0-16383)全部分配完毕:
1 | redis-cli -p 7000 cluster addslots {0..5461} |
此时查看集群状态,显示所有槽分配完毕,集群进入上线状态:
1 | 127.0.0.1:7000> cluster info |
(4)指定主从关系
集群中指定主从关系不再使用slaveof命令,而是使用cluster replicate命令;参数使用节点id。
通过cluster nodes获得几个主节点的节点id后,执行下面的命令为每个从节点指定主节点:
1 | redis-cli -p 8000 cluster replicate cc7d8dbd2d752a2faf8bf50b138fd068b2028947 |
此时执行cluster nodes查看各个节点的状态,可以看到主从关系已经建立。

至此,集群搭建完毕。
2. 使用Ruby脚本搭建集群
在{REDIS_HOME}/src目录下可以看到redis-trib.rb文件,这是一个Ruby脚本,可以实现自动化的集群搭建。
(1)安装Ruby环境
根据不同环境安装Ruby环境
安装Ruby之后 再安装依赖
1 | gem install redis #gem是ruby的包管理工具,该命令可以安装ruby-redis依赖 |
(2)启动节点
与上面方法中的“启动节点”完全相同。
(3)搭建集群
redis-trib.rb脚本提供了众多命令,其中create用于搭建集群,使用方法如下:
1 | ./redis-trib.rb create --replicas 1 127.0.0.1:7000 127.0.0.1:7001 127.0.0.1:7002 127.0.0.1:8000 127.0.0.1:8001 127.0.0.1:8002 |
其中:--replicas=1表示每个主节点有1个从节点;后面的多个{ip:port}表示节点地址,前面的做主节点,后面的做从节点。使用redis-trib.rb搭建集群时,要求节点不能包含任何槽和数据。
执行创建命令后,脚本会给出创建集群的计划,如下图所示;计划包括哪些是主节点,哪些是从节点,以及如何分配槽。

中间有个输入yes确认执行计划步骤,确认之后脚本便开始按照计划执行,直至集群搭建完毕。
3. 集群方案设计
设计集群方案时,至少要考虑以下因素:
(1)高可用要求:根据故障转移的原理,至少需要3个主节点才能完成故障转移,且3个主节点不应在同一台物理机上;每个主节点至少需要1个从节点,且主从节点不应在一台物理机上;因此高可用集群至少包含6个节点。
(2)数据量和访问量:估算应用需要的数据量和总访问量(考虑业务发展,留有冗余),结合每个主节点的容量和能承受的访问量(可以通过benchmark得到较准确估计),计算需要的主节点数量。
(3)节点数量限制:Redis官方给出的节点数量限制为1000,主要是考虑节点间通信带来的消耗。在实际应用中应尽量避免大集群;如果节点数量不足以满足应用对Redis数据量和访问量的要求,可以考虑:(1)业务分割,大集群分为多个小集群;(2)减少不必要的数据;(3)调整数据过期策略等。
(4)适度冗余:Redis可以在不影响集群服务的情况下增加节点,因此节点数量适当冗余即可,不用太大。
三、集群的基本原理
上面介绍了集群的搭建方法和设计方案,下面将进一步深入,介绍集群的原理。集群最核心的功能是数据分区,因此首先介绍数据的分区规则;然后介绍集群实现的细节:通信机制和数据结构;最后以cluster meet(节点握手)、cluster addslots(槽分配)为例,说明节点是如何利用上述数据结构和通信机制实现集群命令的。
1. 数据分区方案
数据分区有顺序分区、哈希分区等,其中哈希分区由于其天然的随机性,使用广泛;集群的分区方案便是哈希分区的一种。
| 分布式方式 | 特点 | 典型产品 |
|---|---|---|
| 哈希分布 | 数据分散度高 键值分布业务无关 无法顺序访问 支持批量操作 |
一致性哈希Memcache Redis Cluster 其他缓存产品 |
| 顺序分布 | 数据分散度易倾斜 键值业务相关 可顺序访问 |
BigTable HBase |
哈希分区的基本思路是:对数据的特征值(如key)进行哈希,然后根据哈希值决定数据落在哪个节点。常见的哈希分区包括:哈希取余分区、一致性哈希分区、带虚拟节点的一致性哈希分区等。
衡量数据分区方法好坏的标准有很多,其中比较重要的两个因素是:
(1)数据分布是否均匀
(2)增加或删减节点对数据分布的影响。
由于哈希的随机性,哈希分区基本可以保证数据分布均匀;因此在比较哈希分区方案时,重点要看增减节点对数据分布的影响。
(1)哈希取余分区
哈希取余分区思路非常简单:计算key的hash值,然后对节点数量进行取余,从而决定数据映射到哪个节点上。该方案最大的问题是,当新增或删减节点时,节点数量发生变化,系统中所有的数据都需要重新计算映射关系,引发大规模数据迁移。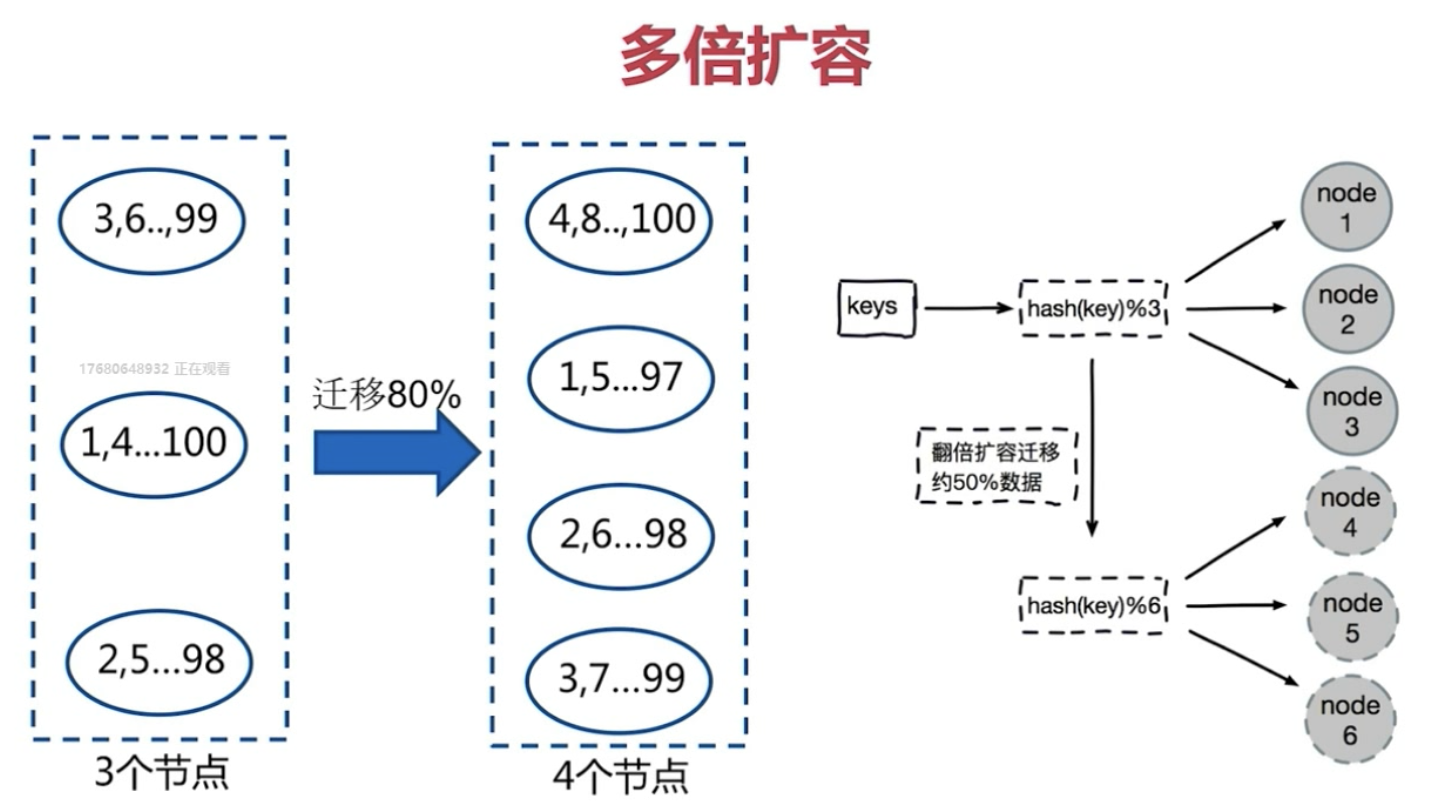
在扩容的时候 建议多倍扩容 迁移率会大大降低
注意:在数据迁移之后 再次访问数据是无法从缓存中得到,需要从数据库加载数据然后回写到缓存,会涉及到大量的缓存回写,降低服务性能,增大数据库压力。
(2)一致性哈希分区
一致性哈希算法将整个哈希值空间组织成一个虚拟的圆环,如下图所示,范围为0-2^32-1;对于每个数据,根据key计算hash值,确定数据在环上的位置,然后从此位置沿环顺时针行走,找到的第一台服务器就是其应该映射到的服务器。
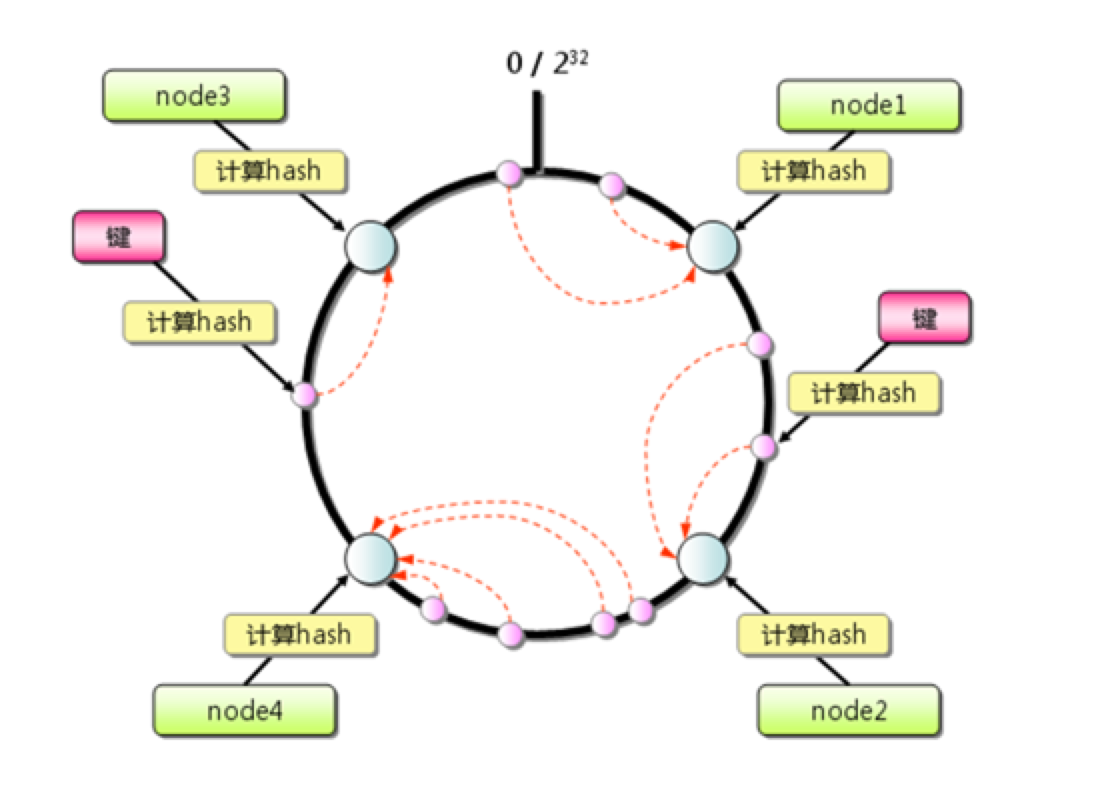
与哈希取余分区相比,一致性哈希分区将增减节点的影响限制在相邻节点。以上图为例,如果在node1和node2之间增加node5,则只有node2中的一部分数据会迁移到node5;如果去掉node2,则原node2中的数据只会迁移到node4中,只有node4会受影响。
一致性哈希分区的主要问题在于,当节点数量较少时,增加或删减节点,对单个节点的影响可能很大,造成数据的严重不平衡。还是以上图为例,如果去掉node2,node4中的数据由总数据的1/4左右变为1/2左右,与其他节点相比负载过高(因此我们在进行扩容的时候尽量翻倍伸缩来保证最小迁移数据和负载均衡)。
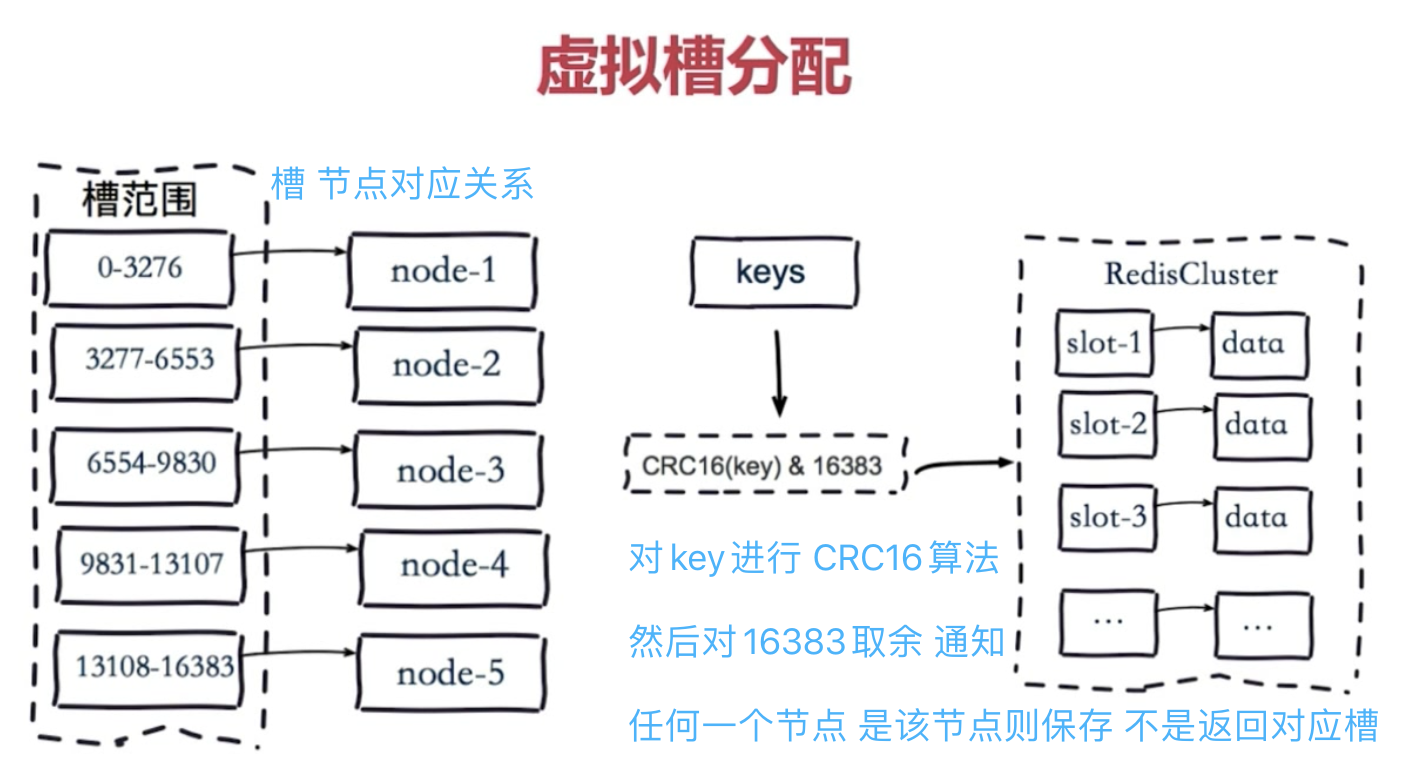
(3)带虚拟节点的一致性哈希分区(虚拟槽分区)
该方案在一致性哈希分区的基础上,引入了虚拟节点的概念。Redis集群使用的便是该方案,其中的虚拟节点称为槽(slot)。槽是介于数据和实际节点之间的虚拟概念;每个实际节点包含一定数量的槽,每个槽包含哈希值在一定范围内的数据。引入槽以后,数据的映射关系由数据hash->实际节点,变成了数据hash->槽->实际节点。
在使用了槽的一致性哈希分区中,槽是数据管理和迁移的基本单位。槽解耦了数据和实际节点之间的关系,增加或删除节点对系统的影响很小。仍以上图为例,系统中有4个实际节点,假设为其分配16个槽(0-15); 槽0-3位于node1,4-7位于node2,以此类推。如果此时删除node2,只需要将槽4-7重新分配即可,例如槽4-5分配给node1,槽6分配给node3,槽7分配给node4;可以看出删除node2后,数据在其他节点的分布仍然较为均衡。
槽的数量一般远小于2^32,远大于实际节点的数量;在Redis集群中,槽的数量为16384(2^14)。
下面这张图很好的总结了Redis集群将数据映射到实际节点的过程: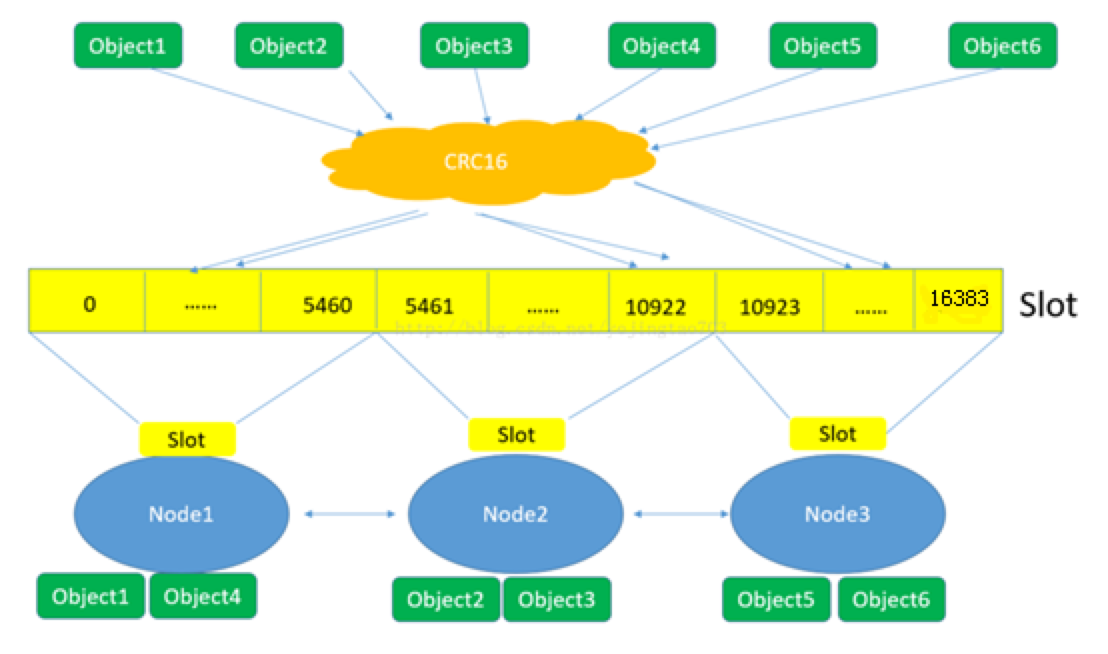
(1)Redis对数据的特征值(一般是key)计算哈希值,使用的算法是CRC16。
(2)根据哈希值,计算数据属于哪个槽。
(3)根据槽与节点的映射关系,计算数据属于哪个节点
2. 节点通信机制
集群要作为一个整体工作,离不开节点之间的通信。
两个端口
在哨兵系统中,节点分为数据节点和哨兵节点:前者存储数据,后者实现额外的控制功能。在集群中,没有数据节点与非数据节点之分:所有的节点都存储数据,也都参与集群状态的维护。为此,集群中的每个节点,都提供了两个TCP端口:
- 普通端口:即我们在前面指定的端口(7000等)。普通端口主要用于为客户端提供服务(与单机节点类似);但在节点间数据迁移时也会使用。
- 集群端口:端口号是普通端口+10000(10000是固定值,无法改变),如7000节点的集群端口为17000。集群端口只用于节点之间的通信,如搭建集群、增减节点、故障转移等操作时节点间的通信;不要使用客户端连接集群接口。为了保证集群可以正常工作,在配置防火墙时,要同时开启普通端口和集群端口。
Gossip协议
节点间通信,按照通信协议可以分为几种类型:单对单、广播、Gossip协议等。重点是广播和Gossip的对比。
广播是指向集群内所有节点发送消息;优点是集群的收敛速度快(集群收敛是指集群内所有节点获得的集群信息是一致的),缺点是每条消息都要发送给所有节点,CPU、带宽等消耗较大。
Gossip协议的特点是:在节点数量有限的网络中,每个节点都“随机”的与部分节点通信(并不是真正的随机,而是根据特定的规则选择通信的节点),经过一番杂乱无章的通信,每个节点的状态很快会达到一致。Gossip协议的优点有负载(比广播)低、去中心化、容错性高(因为通信有冗余)等;缺点主要是集群的收敛速度慢。
消息类型
集群中的节点采用固定频率(每秒10次)的定时任务进行通信相关的工作:判断是否需要发送消息及消息类型、确定接收节点、发送消息等。如果集群状态发生了变化,如增减节点、槽状态变更,通过节点间的通信,所有节点会很快得知整个集群的状态,使集群收敛。
节点间发送的消息主要分为5种:meet消息、ping消息、pong消息、fail消息、publish消息。不同的消息类型,通信协议、发送的频率和时机、接收节点的选择等是不同的。
- MEET消息:在节点握手阶段,当节点收到客户端的CLUSTER MEET命令时,会向新加入的节点发送MEET消息,请求新节点加入到当前集群;新节点收到MEET消息后会回复一个PONG消息。
- PING消息:集群里每个节点每秒钟会选择部分节点发送PING消息,接收者收到消息后会回复一个PONG消息。PING消息的内容是自身节点和部分其他节点的状态信息;作用是彼此交换信息,以及检测节点是否在线。PING消息使用Gossip协议发送,接收节点的选择兼顾了收敛速度和带宽成本,具体规则如下:(1)随机找5个节点,在其中选择最久没有通信的1个节点(2)扫描节点列表,选择最近一次收到PONG消息时间大于cluster_node_timeout/2的所有节点,防止这些节点长时间未更新。
- PONG消息:PONG消息封装了自身状态数据。可以分为两种:第一种是在接到MEET/PING消息后回复的PONG消息;第二种是指节点向集群广播PONG消息,这样其他节点可以获知该节点的最新信息,例如故障恢复后新的主节点会广播PONG消息。
- FAIL消息:当一个主节点判断另一个主节点进入FAIL状态时,会向集群广播这一FAIL消息;接收节点会将这一FAIL消息保存起来,便于后续的判断。
- PUBLISH消息:节点收到PUBLISH命令后,会先执行该命令,然后向集群广播这一消息,接收节点也会执行该PUBLISH命令。
3. 数据结构
节点需要专门的数据结构来存储集群的状态。所谓集群的状态,是一个比较大的概念,包括:集群是否处于上线状态、集群中有哪些节点、节点是否可达、节点的主从状态、槽的分布……
节点为了存储集群状态而提供的数据结构中,最关键的是clusterNode和clusterState结构:前者记录了一个节点的状态,后者记录了集群作为一个整体的状态。
clusterNode
clusterNode结构保存了一个节点的当前状态,包括创建时间、节点id、ip和端口号等。每个节点都会用一个clusterNode结构记录自己的状态,并为集群内所有其他节点都创建一个clusterNode结构来记录节点状态。
下面列举了clusterNode的部分字段,并说明了字段的含义和作用:
1 | typedef struct clusterNode { |
除了上述字段,clusterNode还包含节点连接、主从复制、故障发现和转移需要的信息等。
clusterState
clusterState结构保存了在当前节点视角下,集群所处的状态。主要字段包括:
1 | typedef struct clusterState { |
除此之外,clusterState还包括故障转移、槽迁移等需要的信息。
4. 集群命令的实现
这一部分将以cluster meet(节点握手)、cluster addslots(槽分配)为例,说明节点是如何利用上述数据结构和通信机制实现集群命令的。
cluster meet
假设要向A节点发送cluster meet命令,将B节点加入到A所在的集群,则A节点收到命令后,执行的操作如下:
1) A为B创建一个clusterNode结构,并将其添加到clusterState的nodes字典中
2) A向B发送MEET消息
3) B收到MEET消息后,会为A创建一个clusterNode结构,并将其添加到clusterState的nodes字典中
4) B回复A一个PONG消息
5) A收到B的PONG消息后,便知道B已经成功接收自己的MEET消息
6) 然后,A向B返回一个PING消息
7) B收到A的PING消息后,便知道A已经成功接收自己的PONG消息,握手完成
8) 之后,A通过Gossip协议将B的信息广播给集群内其他节点,其他节点也会与B握手;一段时间后,集群收敛,B成为集群内的一个普通节点
通过上述过程可以发现,集群中两个节点的握手过程与TCP类似,都是三次握手:A向B发送MEET;B向A发送PONG;A向B发送PING。
cluster addslots
集群中槽的分配信息,存储在clusterNode的slots数组和clusterState的slots数组中,两个数组的结构前面已做介绍;二者的区别在于:前者存储的是该节点中分配了哪些槽,后者存储的是集群中所有槽分别分布在哪个节点。
cluster addslots命令接收一个槽或多个槽作为参数,例如在A节点上执行cluster addslots {0..10}命令,是将编号为0-10的槽分配给A节点,具体执行过程如下:
1) 遍历输入槽,检查它们是否都没有分配,如果有一个槽已分配,命令执行失败;方法是检查输入槽在clusterState.slots[]中对应的值是否为NULL。
2) 遍历输入槽,将其分配给节点A;方法是修改clusterNode.slots[]中对应的比特为1,以及clusterState.slots[]中对应的指针指向A节点
3) A节点执行完成后,通过节点通信机制通知其他节点,所有节点都会知道0-10的槽分配给了A节点